The ROS4HRI Standard
The ROS4HRI standard is defined in REP-155. It specifies conventions and interfaces for Human-Robot Interaction (HRI) perception in ROS.
The standard covers:
Human Representation: Modeling humans as a combination of permanent identities (Persons) and transient parts (Faces, Bodies, Voices).
Topics Structure : Naming conventions under the
/humans/namespace.Kinematic Model and Coordinate Frames: TF frames and URDF models for humans.
Group Interactions: Representation of social groups and gaze.
Important
Want to suggest a change to ROS4HRI? propose an extension? open a discussion on the ROS4HRI GitHub organization to get the ball rolling!
Human Representation
A person is represented by four unique identifiers (UUIDs):
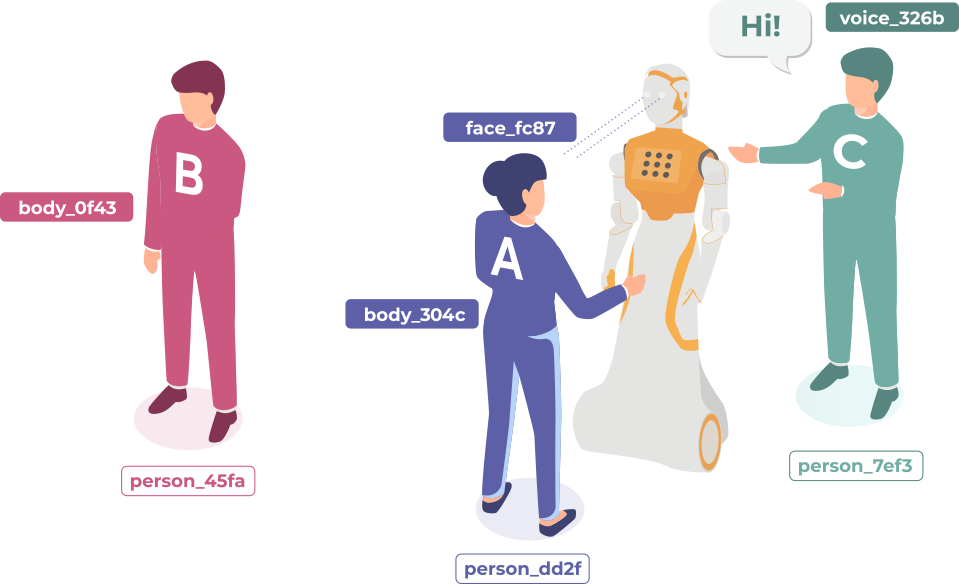
Person ID: A permanent identifier for a unique person.
Face ID: A transient identifier for a detected face.
Body ID: A transient identifier for a detected body/skeleton.
Voice ID: A transient identifier for a detected voice.
These identifiers are linked together. For example, a face and a body might be associated with the same person.
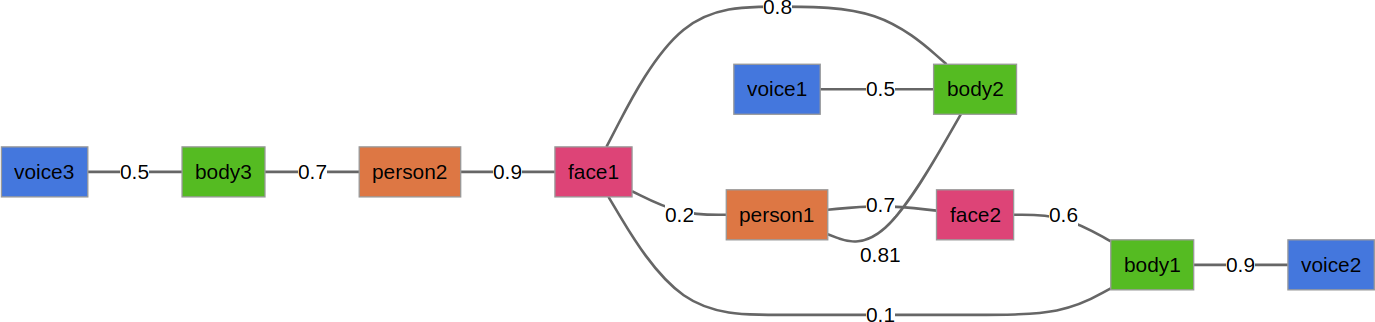
The hri_person_manager node provides tools to manage these identities and publish the relations between identifiers.
See also
For more details on the ROS4HRI human model, refer to the Human Representation section of REP-155.
Topics Structure
All HRI-related topics are grouped under /humans/.
/humans/faces/: Face detection and recognition./humans/faces/tracked: List of currently tracked faces./humans/faces/<faceID>/: Topics for a specific face (e.g., cropped image, landmarks).
/humans/bodies/: Body tracking./humans/bodies/tracked: List of currently tracked bodies./humans/bodies/<bodyID>/: Topics for a specific body (e.g., joint states).
/humans/voices/: Voice activity and localization./humans/voices/tracked: List of currently tracked voices.
/humans/persons/: High-level person tracking./humans/persons/tracked: List of currently tracked persons./humans/persons/known: List of all known persons./humans/persons/<personID>/: Topics for a specific person.
/humans/interactions/: Group interactions and social signals.
See also
For more details on the ROS4HRI topic structure, refer to the Topics Structure section of REP-155.
Kinematic Model and Coordinate Frames
ROS4HRI defines standard TF frames:
face_<faceID>: Head pose (origin at sellion, x-forward, z-up).gaze_<faceID>: Gaze direction (z-aligned with gaze vector).body_<bodyID>: Body root (mid-point of hips).voice_<voiceID>: Sound source location.
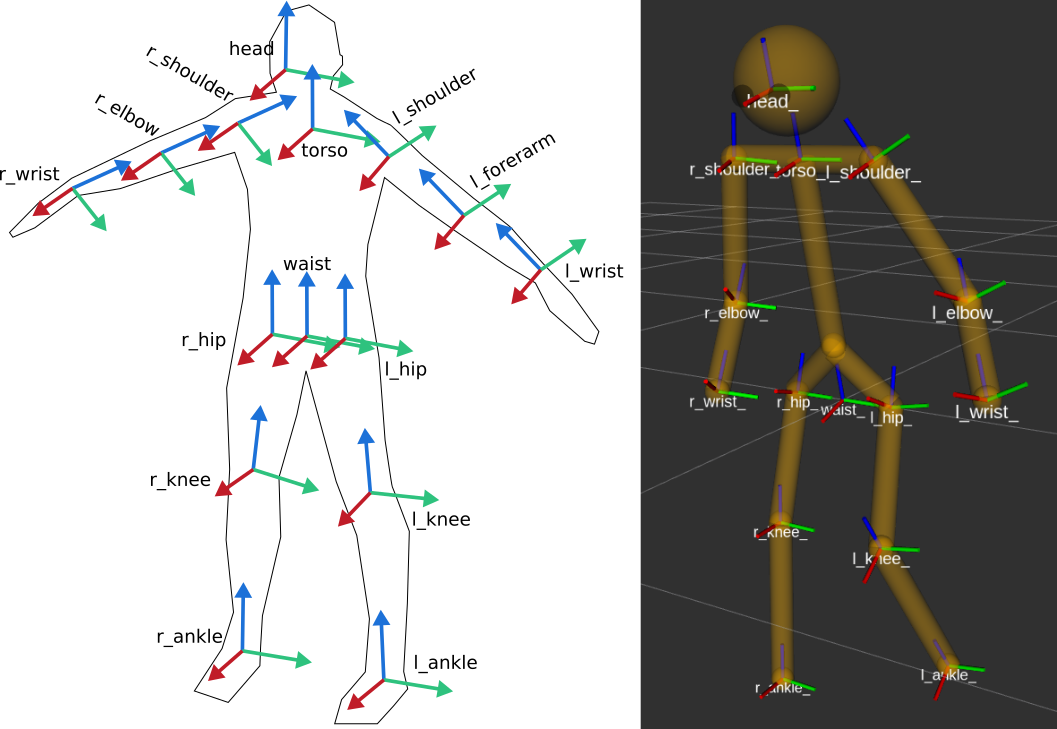
A standard URDF model for humans is provided by the human_description package.
See also
For more details on the ROS4HRI kinematic model, refer to the Kinematic Model section of REP-155.
See also
For more details, please refer to the full REP-155 specification.