Welcome to ROS4HRI
ROS for Human-Robot Interaction (or ROS4HRI in short) is the main ROS API for your robot to represent information about the human surrounding and interacting with the robot.
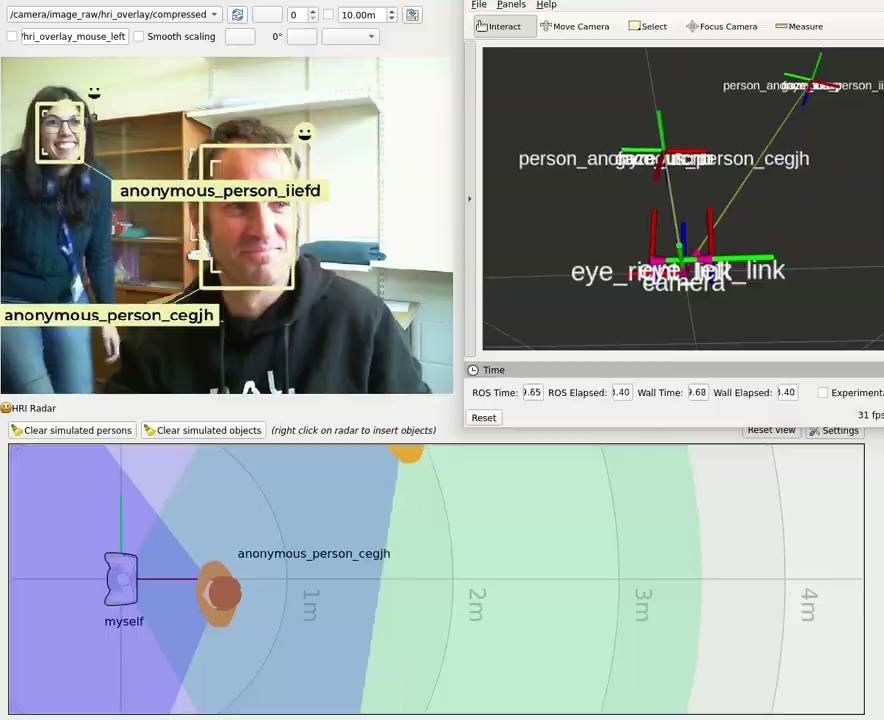
ROS4HRI includes both a set of conventions and tools that help developing Human-Robot Interaction capabilities, and a large set of ROS packages that implement these conventions.

Contents:
This project has received funding from the European Union’s Horizon Europe research and innovation programme.
